Renode
I find it a useful tool. Maybe you will, too!
About Me: I Do Weird Hardware
- Simmel: Contact Tracing with Audio
- Chibitronics: Programming Stickers with Audio
- Novena: Open Source Laptop
- Senoko: Open Source Power Board for Novena
About Renode
- Whole-System Emulator
- Supports concurrent emulation
- Extensible with C# and Python
- MIT Licensed
- Windows, Mac, Linux
About This Talk
- Overview of Emulators
- Oevrview of Weird Hardware
- Cool things you can do
Who will find this interesting?
- Creators: Those making new boards or hardware
- Integrators: Running CI on firmware files
- Reverse Engineers: Understanding new hardware and firmware
Creators: Making New Things!
- Reusing an existing platform
- Reusing an existing microcontroller
- New microcontroller fron existing family
Integrators: Making Sure Nothing Broke!
- Hardware testing incompatible with cloud
- ...it sure is effective, though
- Hardware crunch makes it difficult to get hardware
- Downloading software is much cheaper than shipping
- Can run tests on every code push
Reverse Engineers: What Is This Blob Doing?
- Staring at code flow is enlightening, but time-consuming
- What is it doing and how does it get there?
- How can we make it do $x?
What is an Emulator?

What is an Emulator?
Whole-System Emulator
Whole-System Emulator
Transparent Emulator
- HyperV
- WSL2/Docker
- qemu on Linux
- Rosetta on Mac
Debugger/Emulator
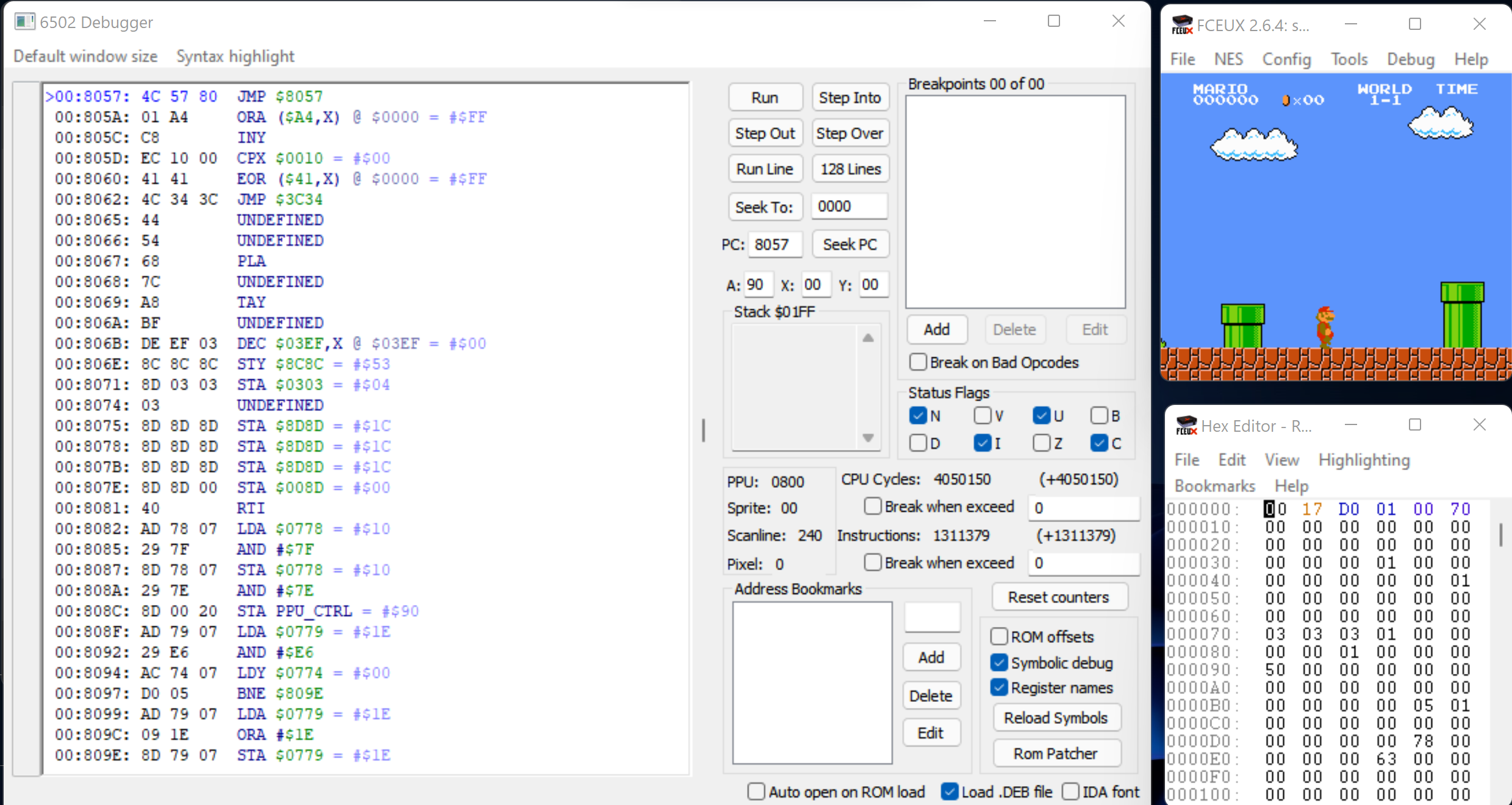
- FCEUX (Nintendo Entertainment System)
- Dolphin (Wii / Gamecube)
Renode Is All of These
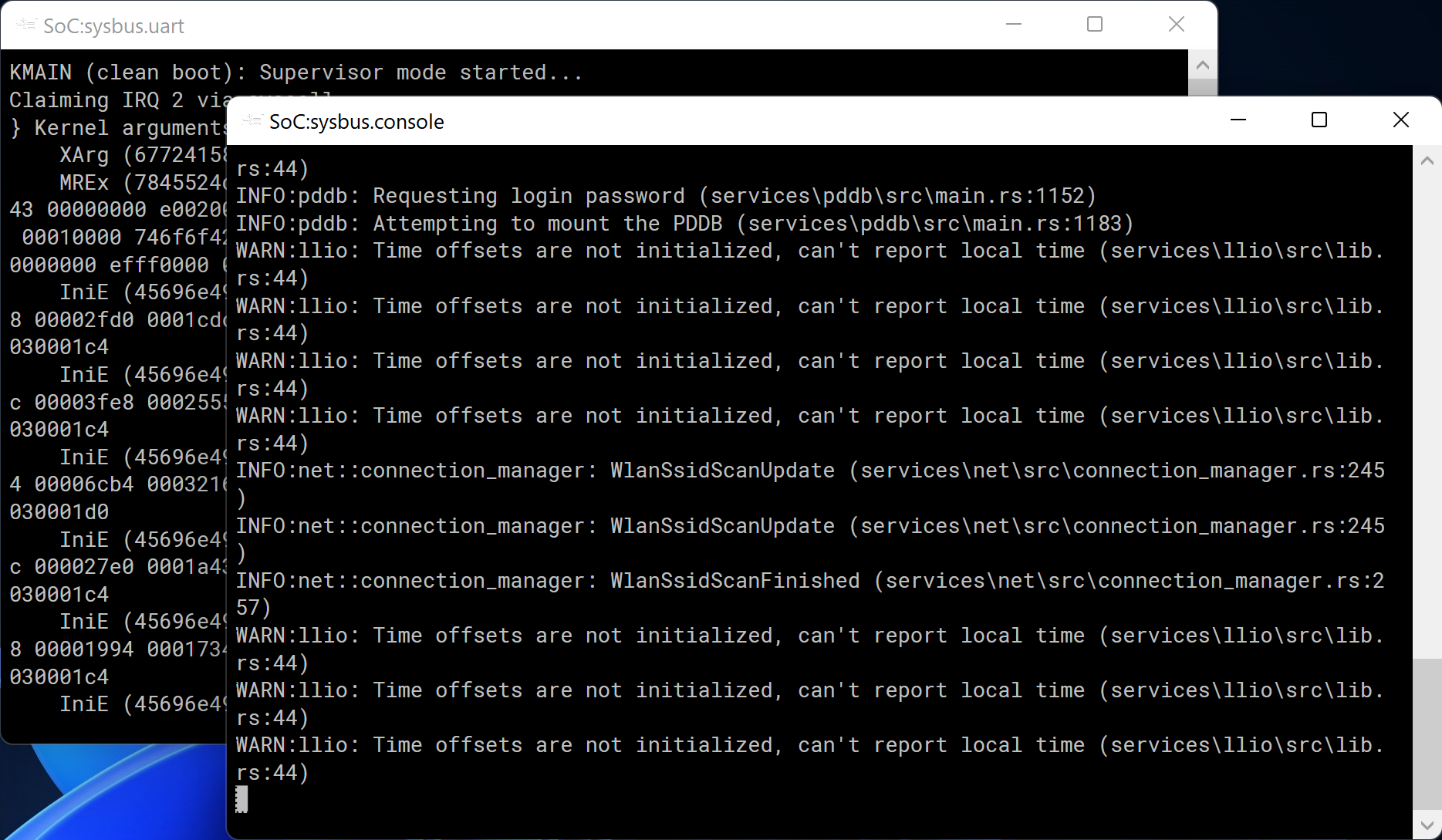
- Console: Able to present an interactive environment
- Transparent: Can run in CI via Robot commands
- Debugger: Has a GDB server built in
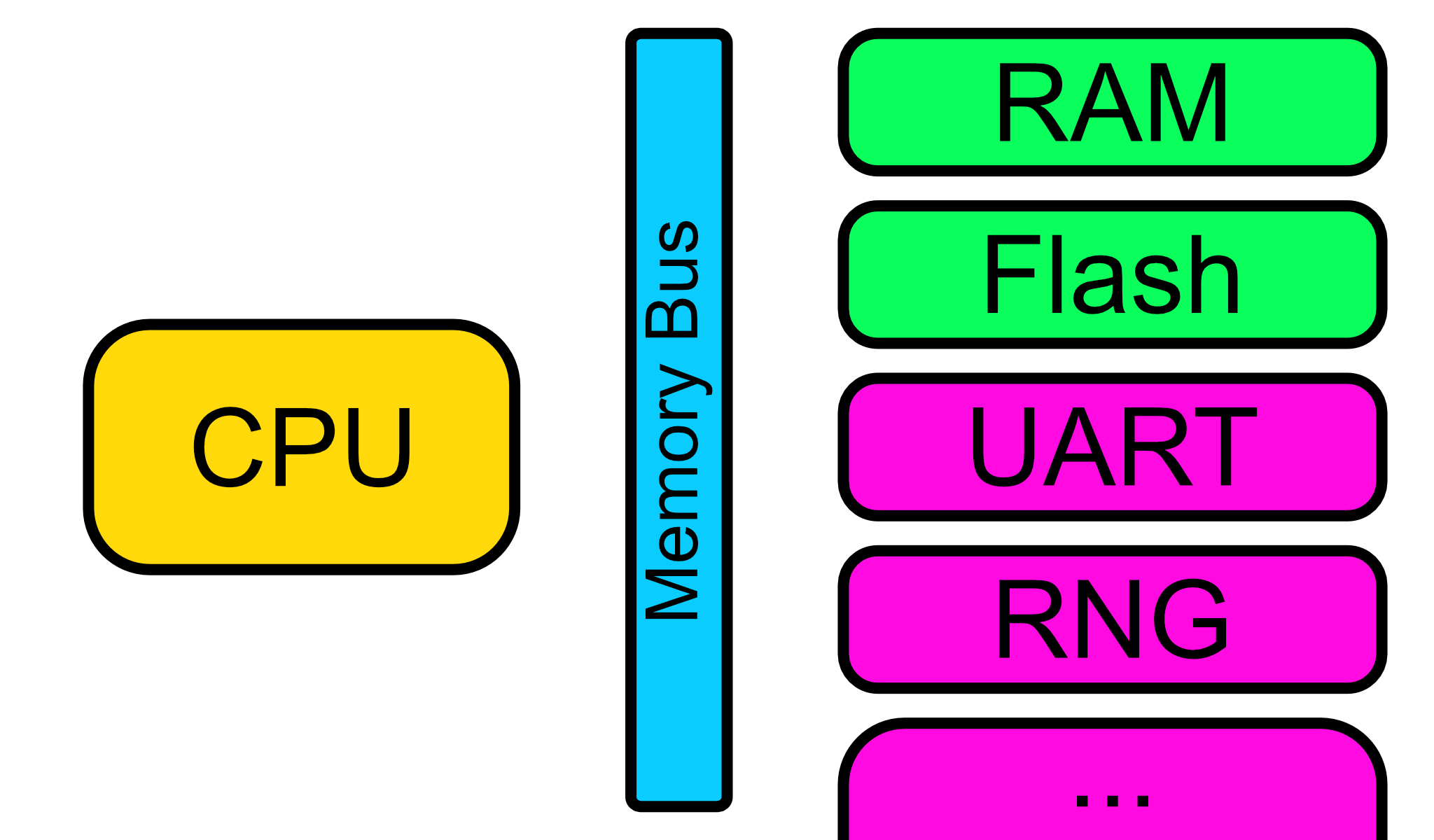
What is a Computer?
What is a Computer?
What is a Computer?
What is a Computer?
What is a Computer?
What is a Computer?
What is a Computer?
What is a Computer?
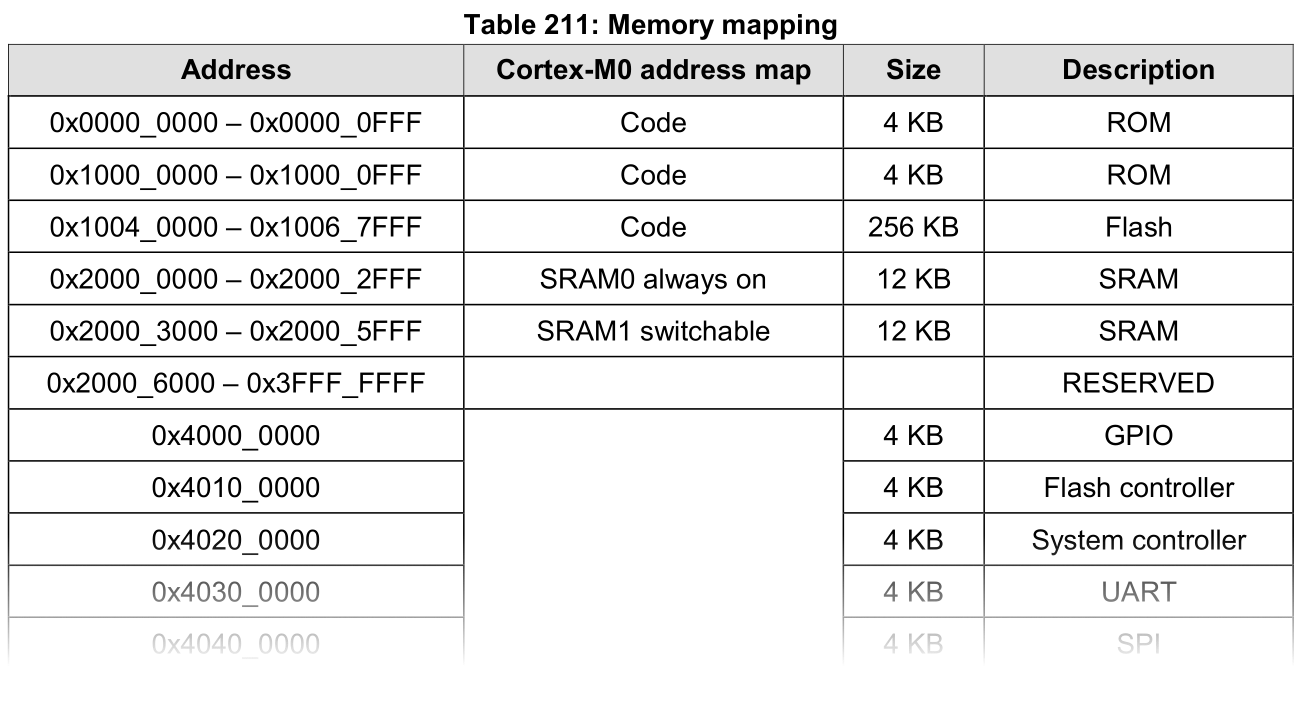
Defining a Computer in Renode
flash: Memory.MappedMemory @ sysbus 0x00000000
size: 0x00008000
sram: Memory.MappedMemory @ sysbus 0x20000000
size: 0x00001000
nvic: IRQControllers.NVIC @ sysbus 0xE000E000
IRQ -> cpu@0
cpu: CPU.CortexM @ sysbus
nvic: nvic
cpuType: "cortex-m0+"
PerformanceInMips: 24
Example of Weird Hardware
- NRF52840
- LM74 Temperature Sensor
Example of Weird Hardware
- NRF52833
- LM74 Temperature Sensor
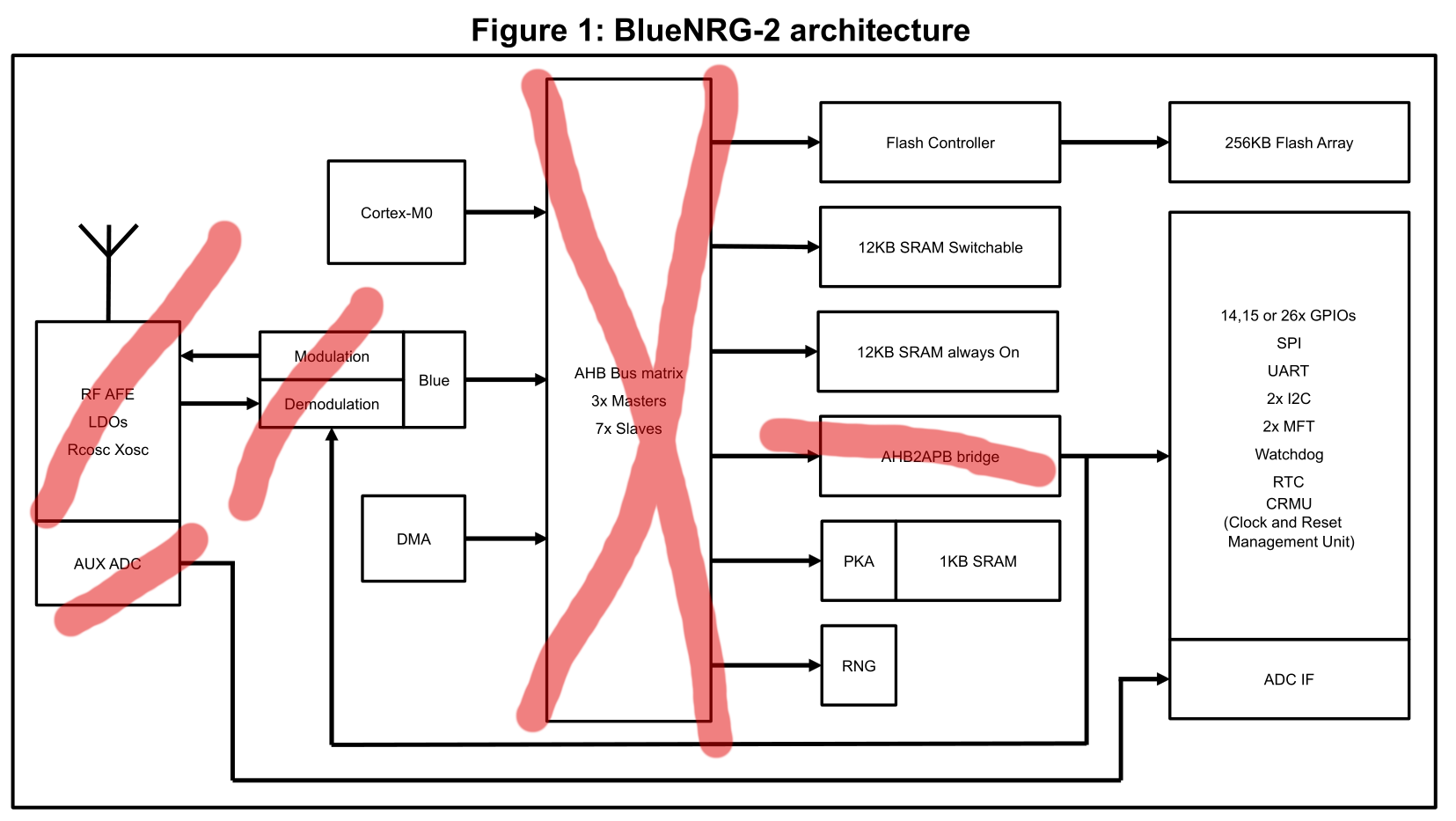
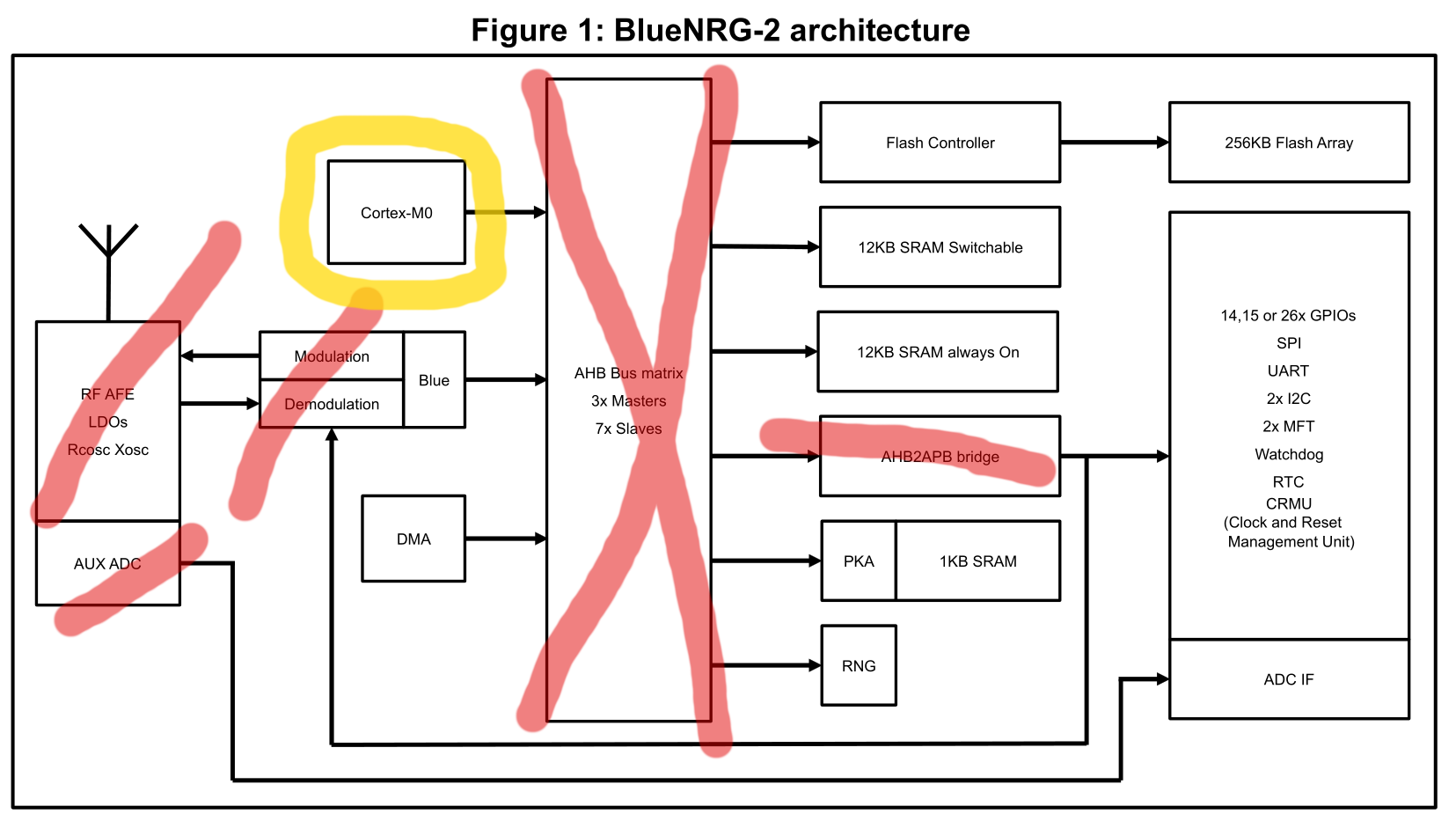
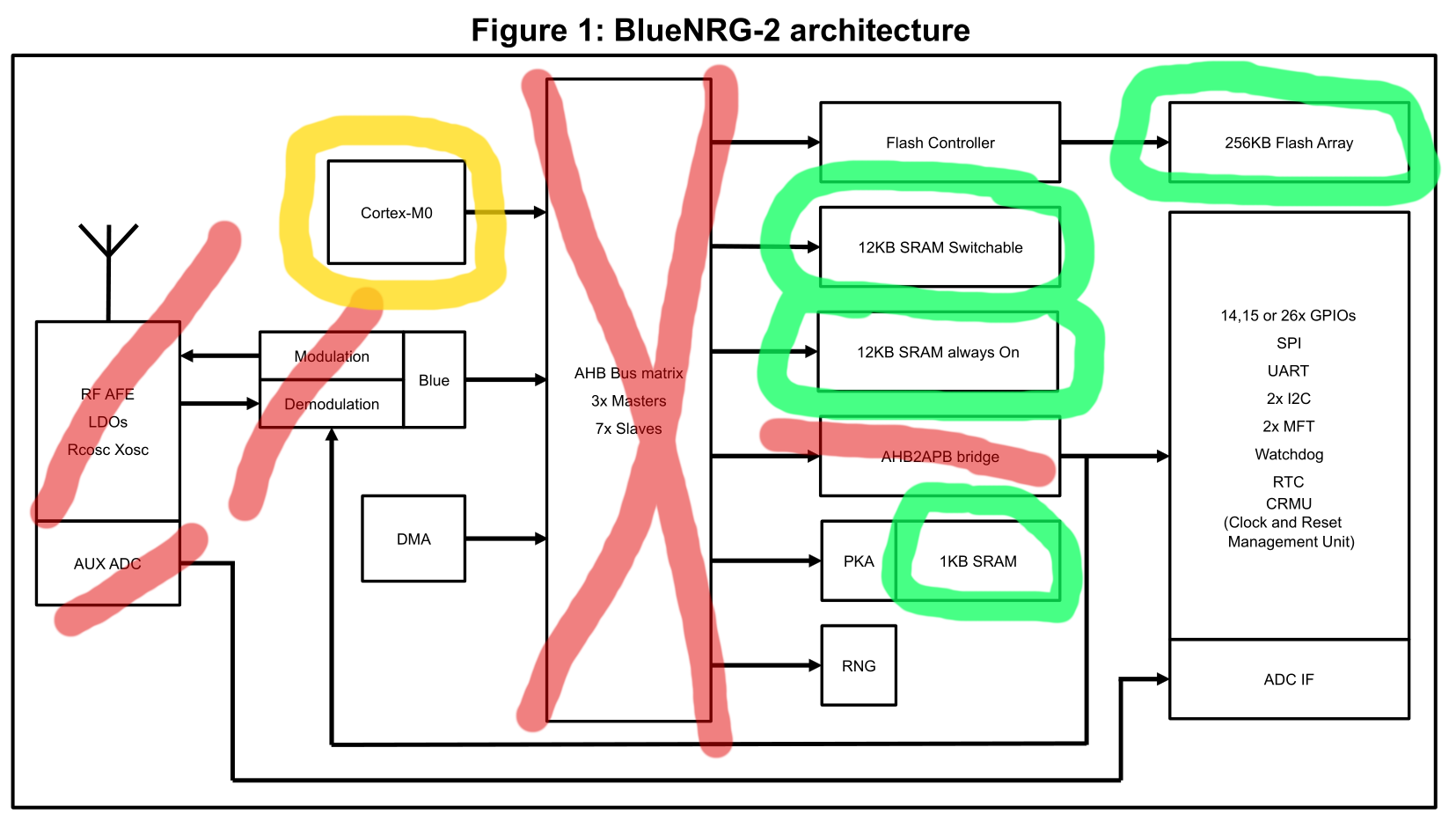
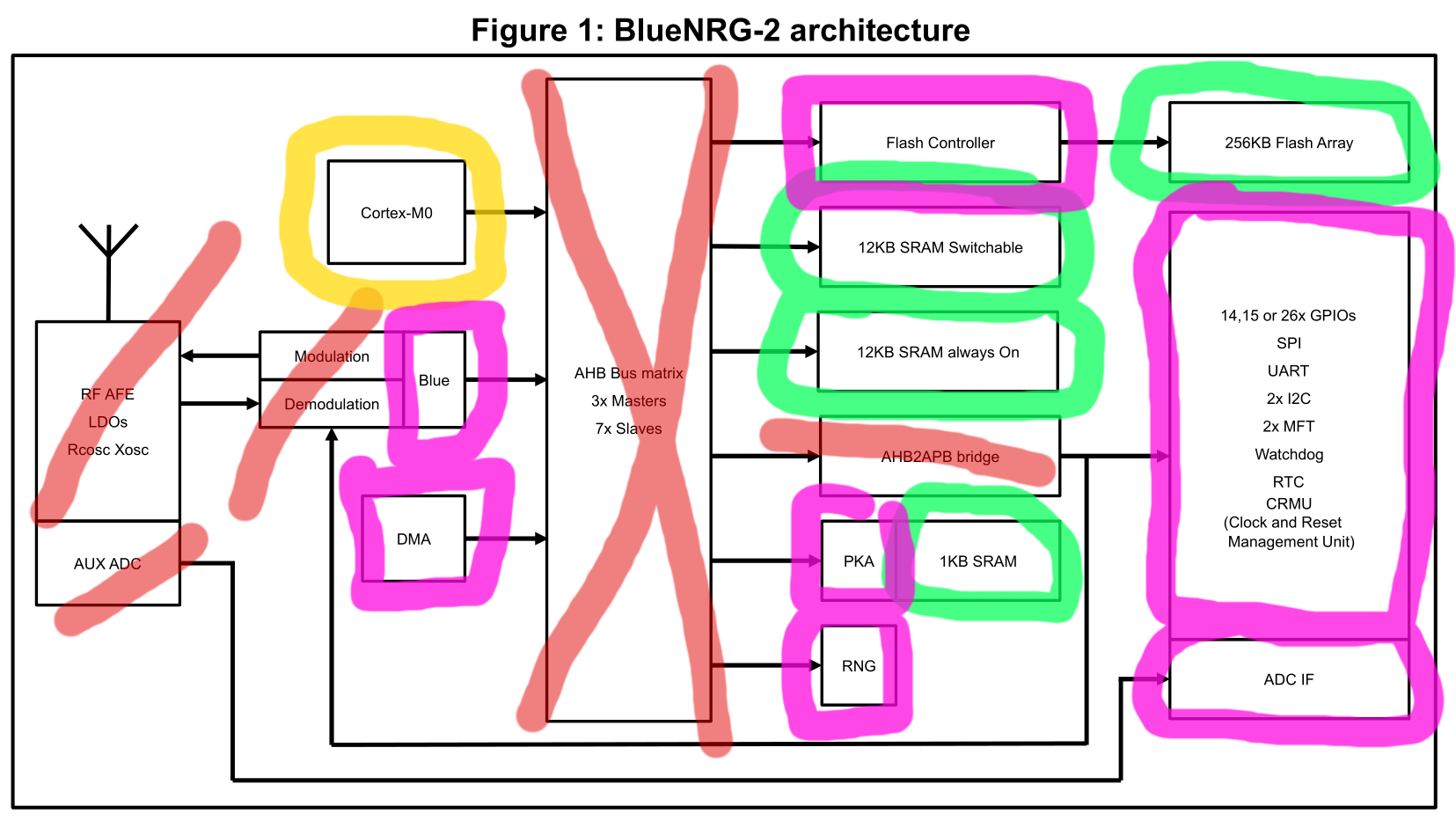
Example of Weird Hardware
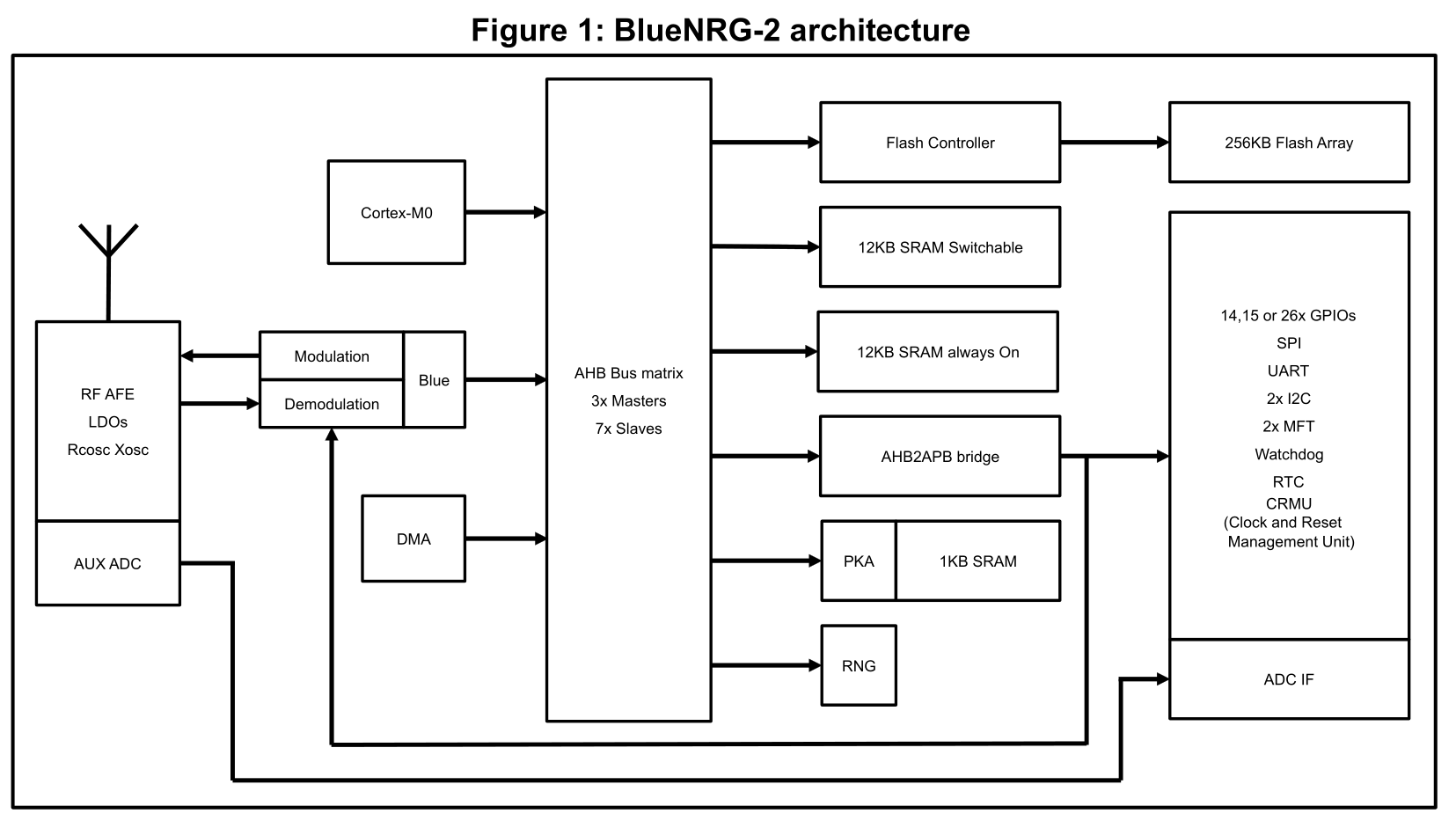
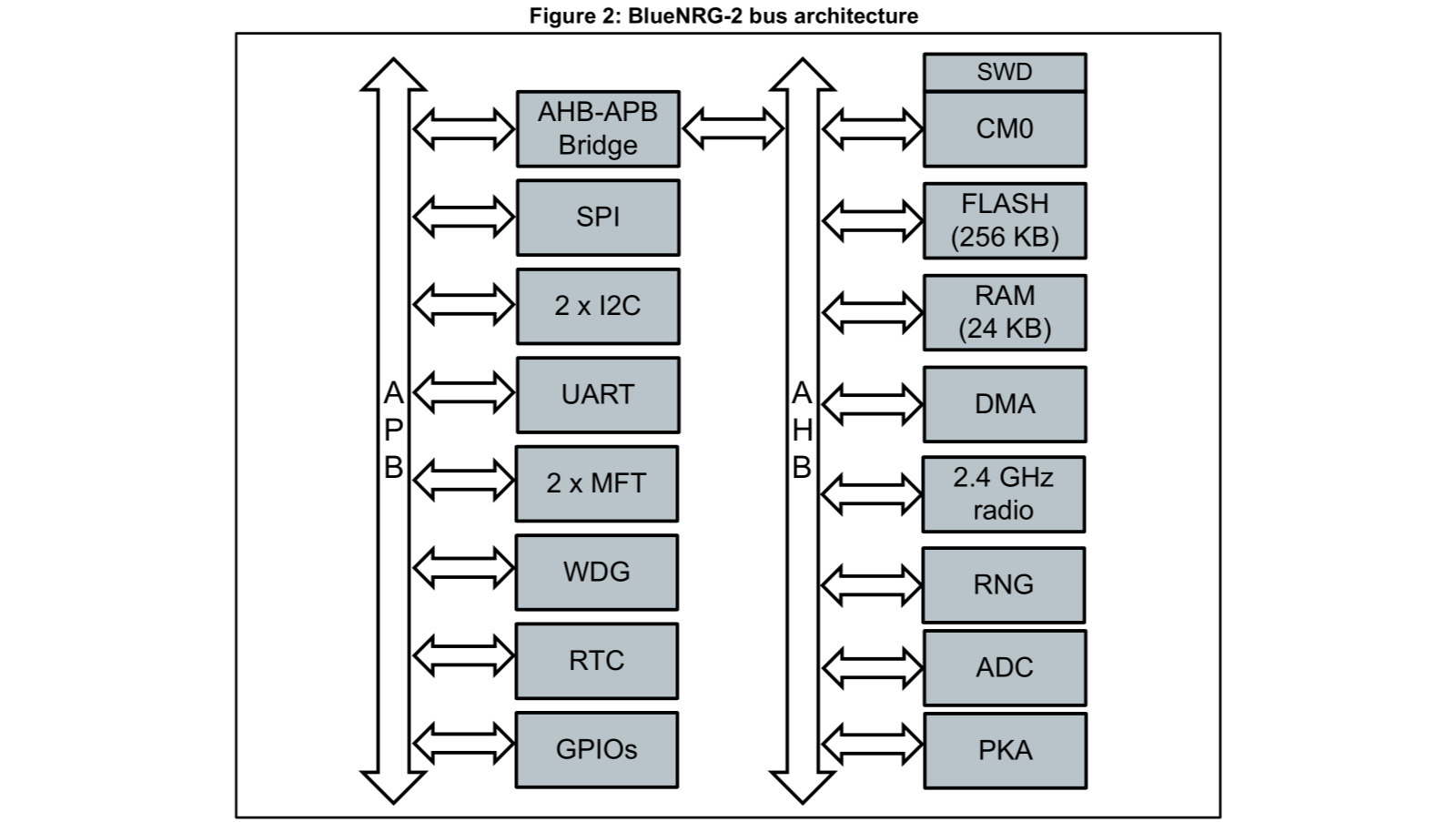
- BlueNRG1
- LM74 Temperature Sensor
Example of Weird Hardware
- RISC-V
- FPGA-based framebuffer
- Initial graphical demo in 1 hour
What makes hardware "Weird"?
- Unusual CPU architecture
- Different model of chip than commonly found
- Additional hardware
- More CPUs per board
Unusual CPU architecture
Sorry, can't helpDifferent model CPU
- Maybe it's just a variant
- Perhaps memory regions were shuffled
- Does it use the same hardware block as someone else?
New hardware version
- Do you use the new, specialized features?
- Lots of UARTs support Infrared. Do you need that?
Completely new hardware
- Time to break out C#
What is "Firmware"?
How does this interact with $VENDOR_TOOL?
What about boot ROMs?
What about missing registers?
- Very few projects use built-in blocks
It's All About Small Victories
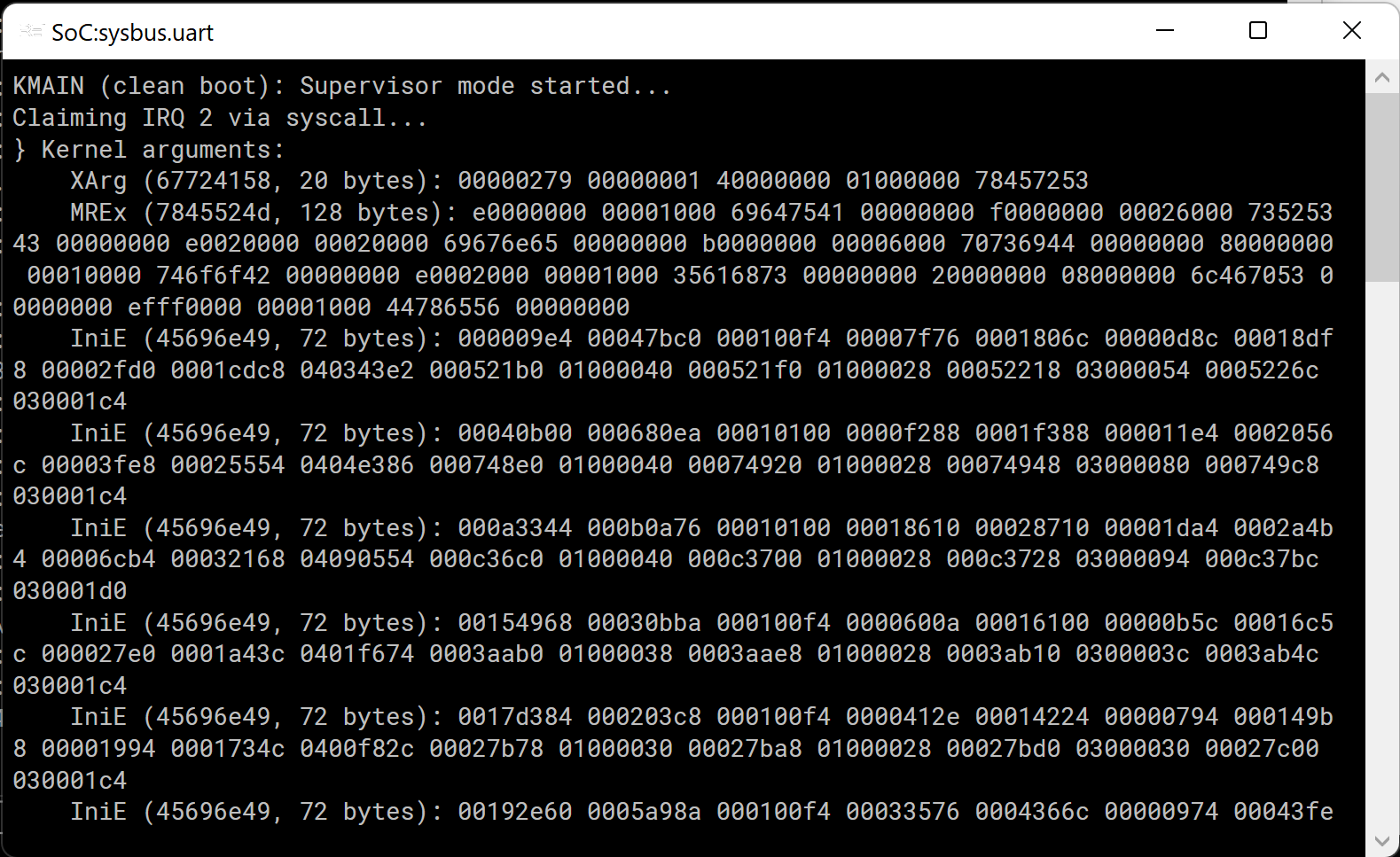
- Serial ports are super rewarding
- They're also usually simple!
- They are easy to script
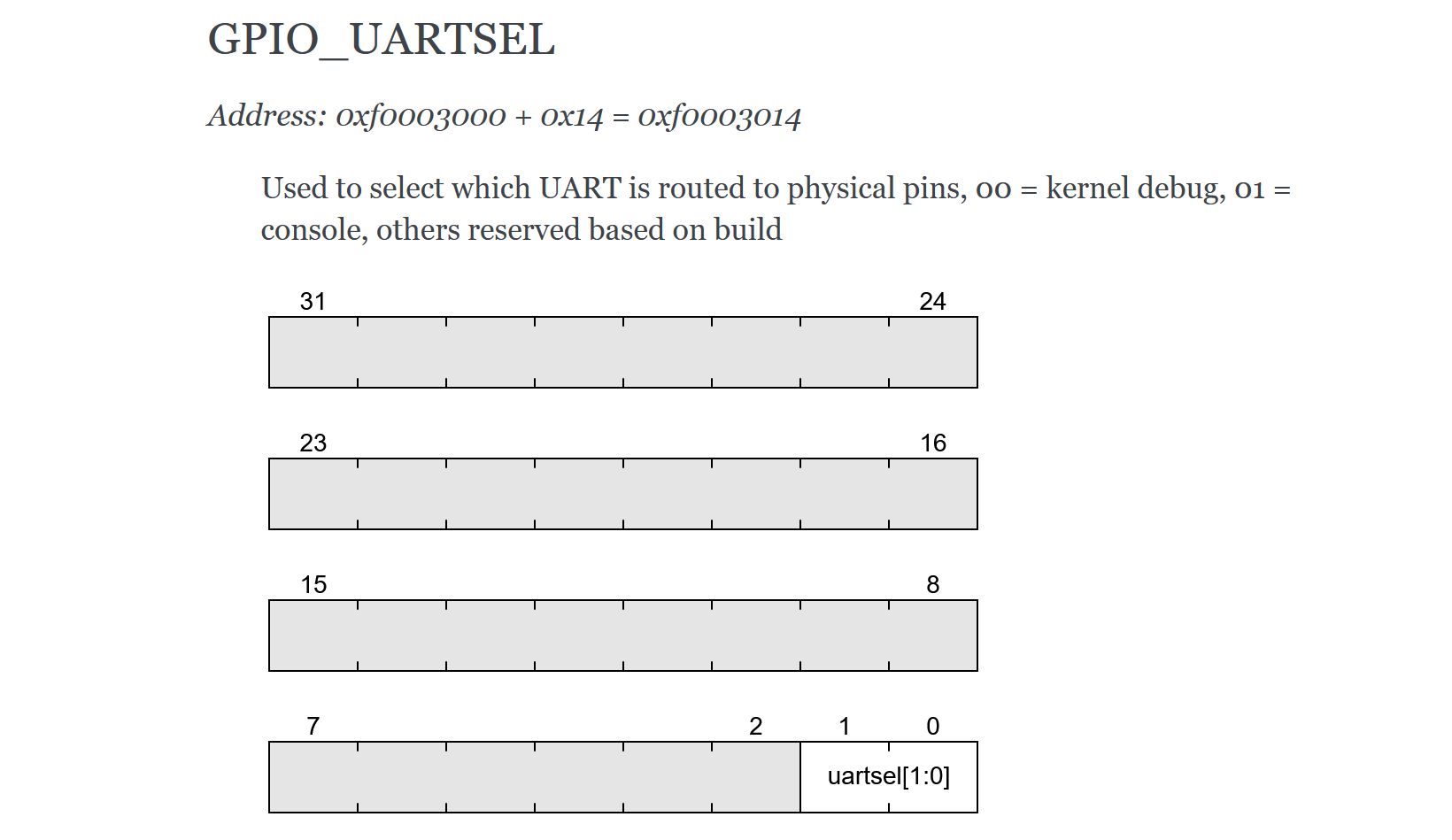
Steps to Set Up a Serial Port
- Enable peripheral
- Set up clock
- Mux GPIOs
- Calculate baud rate
- Write to UART TX register
Steps to Set Up a Serial Port
Advantages of Emulation
Advantages of Emulation
Steps to Set Up a Serial Port
- Interrupt Support
- DMA
Example Serial Port
{(long)Registers.RxTx, new DoubleWordRegister(this)
.WithValueField(0, 8,
writeCallback: (_, value) => {
this.TransmitCharacter((byte)value);
},
valueProviderCallback: _ => {
if(!TryGetCharacter(out var character))
{
this.Log(LogLevel.Warning, "Empty Rx FIFO.");
}
return character;
})
},
Robot Framework: Running Tests in CI
*** Test Cases ***
Should Read Acceleration
Create Machine
Create Terminal Tester ${UART}
Execute Command sysbus.twi1.lis2ds12 AccelerationX 10
Execute Command sysbus.twi1.lis2ds12 AccelerationY 5
Execute Command sysbus.twi1.lis2ds12 AccelerationZ -5
Start Emulation
Wait For Line On Uart x 9.997213 , y 4.997410 , z -4.999803
SVD Files
Logging Memory Accesses
Debugging with GDB
Software Assumes Hardware Works
- Rarely checks for sane ranges (why would you?)
- TOC-TOU
Incremental Changes
- Small changes are very rewrding
- Device will work with only partial implementation